ファナックのオープンプラットフォーム
1. ROS 2 対応
ファナックはロボット駆動の中核となる公式 ROS 2 ドライバを開発し、GitHub*** で公開することで、PCからオープンソースソフトウェア ROS 2 を通じて世界中のユーザーが自由にソフトを組み替え、ファナックロボットを動かせる環境を提供します。特にファナックのROS 2 ドライバは業界最高水準の1ms超高速通信に対応し、リアルタイムな制御が可能となります。

ROS 2 ドライバの世界公開
ROS 2 は、リアルタイム性とセキュリティを強化した次世代のロボット開発基盤です。ファナックでは、世界最大級のプラットフォームであるGitHubに ROS 2 ドライバを公開しました。
これにより、世界中の開発者が共有する軌道計画や画像認識、AIソフトなどの豊富なライブラリを自由に活用し、開発したシステムへ簡単に統合できます。GitHub上での公式サポートも提供しており、フィジカルAIの現場導入を強力に後押しします。

プログラムを組み換え自由自在
ROS 2 の特長は、世界中の開発者がインターネット上に公開している多様なソフトウェアモジュールを、用途に合わせて自在に組み合わせて利用できる点にあります。イーサネット通信を通じて、作成したソフトウェアである、シミュレーション、画像認識、センサ制御、AIアプリケーションなどをファナックロボットに接続可能です。
既存の高度なアルゴリズムのソフトウェアをダウンロードして即座に試せるため、開発期間の短縮と柔軟なシステム構築を同時に実現します。

業界最多のロボット機種、
業界最高水準の1ms超高速通信に対応
ファナックのROS 2 対応は、協働ロボットCRXシリーズから、可搬質量3kgの小型機や2300kgの超大型機まで、極めて幅広いラインアップを網羅しています。これほど多種多様な機種で同一のプラットフォームを利用できるロボットメーカーはファナック以外にありません。更に、ファナックのROS 2 ドライバは業界最高水準の1ms超高速通信に対応しています。
信頼性の高いファナックロボットと、最新のROS 2 環境を組み合わせることで、小規模な実験から大規模な生産ラインまで、あらゆる産業のニーズに最適なロボットシステムを提供し、リアルタイムなロボット制御を可能にします。
2. Python 対応
ファナックのロボット制御装置は、PCを介さずPythonプログラムを直接実行できるようになりました。AI開発に広く使われるPythonを活用して開発したAIによるロボット制御が可能です。

制御装置でPythonを実行
世界中で広く普及しているプログラミング言語「Python」が、ロボット制御装置「R-50iA」上で直接実行可能になりました。これにより、統計処理やデータ解析、画像処理などの豊富なオープンソースライブラリをロボット制御に直結できます。開発環境にはVSCode(Visual Studio Code)**** を使用でき、ステップ実行やブレークポイント、変数ビューといった高度なリモートデバッグ機能を活用した効率的なプログラム開発が可能です。
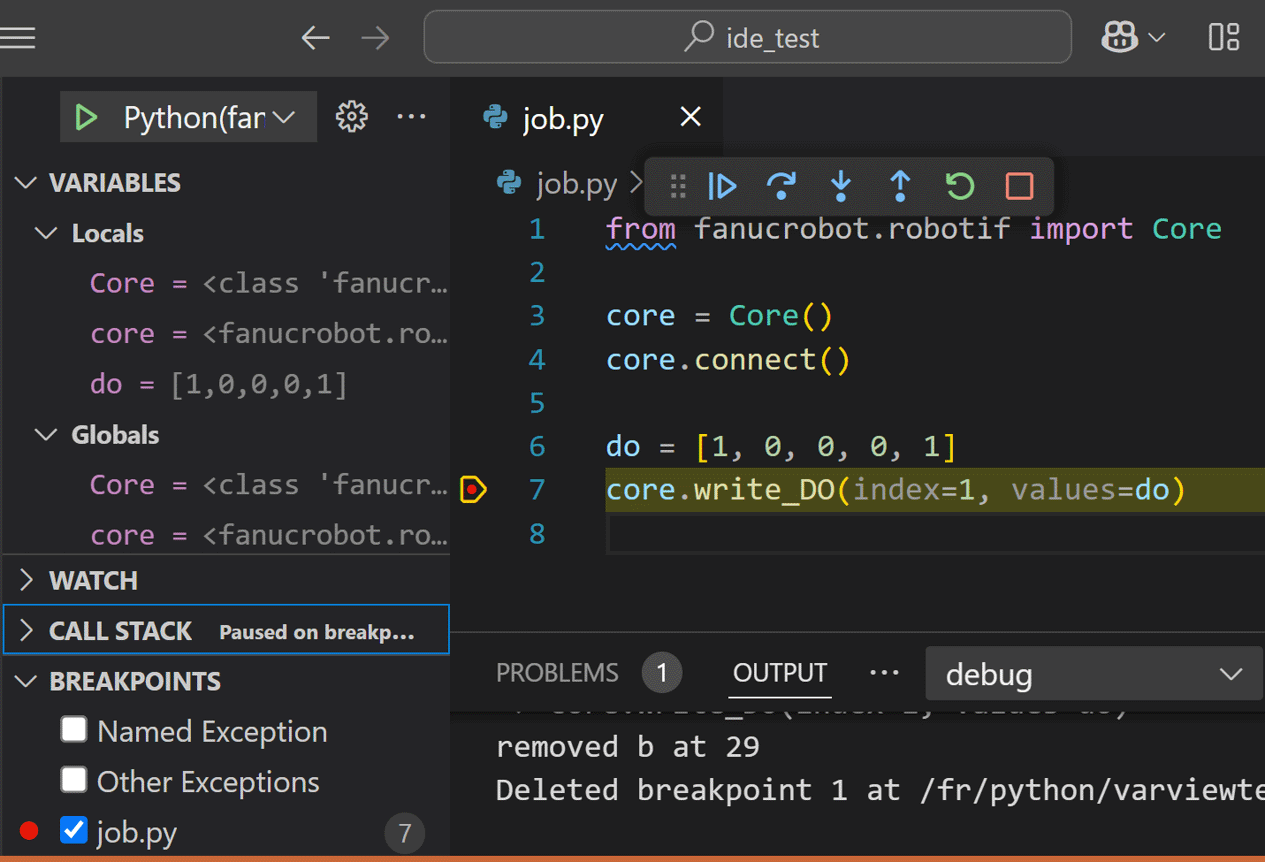
専用ライブラリで使いやすく
ファナックでは、ロボット制御を容易にする専用のPythonライブラリを用意しています。このライブラリを使用することで、I/O(信号入出力)へのアクセスやレジスタ値(変数設定)の取得など、各種ロボットデータへの操作がPythonから直感的に記述できます。
さらに「リモートモーションインタフェース(オプション機能)」を併用すれば、Pythonから直接ロボットの動作命令を実行することも可能です。作成したPythonプログラムは従来のTPプログラムから呼び出せるため、ファナックロボットと最新技術のシームレスな統合を実現します。
3. Stream Motion(位置データ指令高速通信機能) 実装
ファナックは位置データ指令高速通信機能である、ストリームモーション機能を開発しロボットに実装しました。位置・速度・トルクのリアルタイム制御が可能です。PCから送られる動作指令を業界最高水準の1ms超高速通信で実行し、軌跡生成ソフトによるリアルタイムなロボット制御を可能にします。

業界最高水準の1ms超高速通信
ファナックの位置データ指令高速通信機能では、プラットフォームなどに依存しない汎用的な外部指令入力に対応し、業界最高水準である1msの超高速通信を実現しました。この圧倒的な通信速度により、PCや外部デバイスからの指令を遅延なくロボットへ伝達できます。独自のソフトウェアを開発し、クローズドな環境で機密性を保ちながら商品開発を進めたい企業にとって、最適な開発環境を提供します 。
リアルタイムにロボットを制御
1msという極めて短いサイクルでの制御により、緻密でリアルタイムなAI制御の実装を可能にします。例えば、AIロボットがケーブルの感触をリアルタイムに認識しながら行う複雑な組付動作や、人や周囲の状況を認識し、瞬時に軌道を最適化する動きなど、高度なフィジカルAIの生産現場導入を強力に後押しします。最新のデジタル技術とファナックロボットの高い信頼性を融合させ、次世代の自動化を実現します。
位置・速度・トルクの制御を可能に
PCから、位置・速度・トルクの各パラメーターを直接かつ高速に制御できる点が本機能の大きな強みです。この高度な制御インターフェースにより、外部の力覚センサーやビジョンシステム、高度なアルゴリズムとのシームレスな統合が容易になります。ロボットの関節にかかるトルクを緻密にコントロールすることで、外部環境との安全な接触や、よりダイナミックで滑らかな動作生成が可能となります。
* ROS はOpen Source Robotics Foundationの商標です。
** Python はPython Software Foundationの登録商標です。
*** GitHubはGitHub, Inc.の登録商標です。
**** Visual Studio Code、VSCodeは、Microsoft Corporationの商標です。

