ファナックのオープンプラットフォーム
フィジカルAIによる次世代の自動化
このページでは、ファナックのオープンプラットフォーム技術を活用したフィジカルAIの最新事例をご紹介します。
ロボットが自律的に周囲の環境や人の指示を認識し、柔軟に適応することで、従来のティーチングでは難しかった高度で臨機応変な作業を実現。これからの生産現場のあり方を大きく変革します。
2025.12
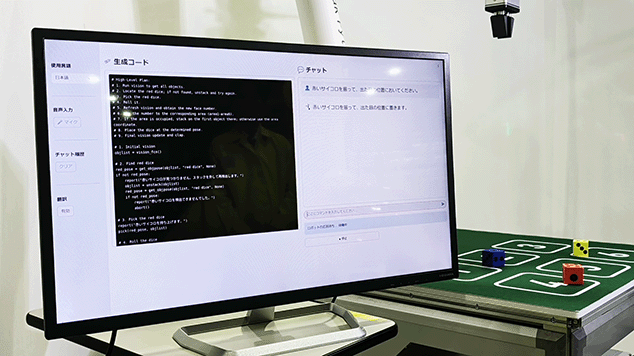
生成AI × ロボット 言葉で操作
AIロボットが様々な言語の音声命令を認識し、生成AIでPythonプログラムを自動作成、周囲を認識しながら命令を実行します。
2025.12
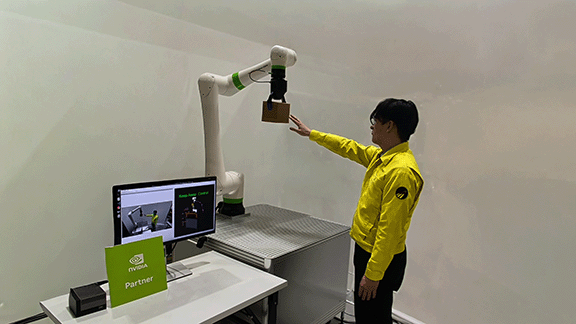
人にぶつからないAIロボット
AIロボットが人を認識し、作業を止めることなくリアルタイムに退避します。人が離れると、元の軌道に復帰します。
2025.12
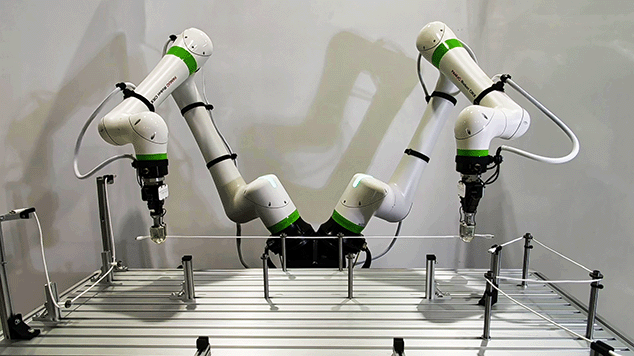
アーム2本で柔らかケーブルを配線
アーム2本が協調作業で柔らかいケーブルを人手の感覚で把握し、張りを認識しながら配線します。
2025.12
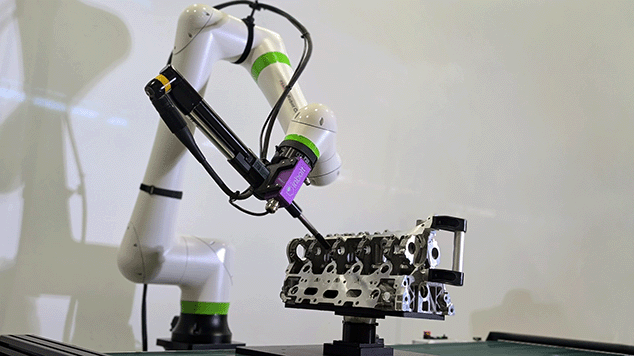
動く部品を追いかけ、ねじ締め
AIロボットが3次元的に動くワークを認識し、リアルタイムに追従。3次元空間で高い追従性能を発揮し、動きながらのねじ締めを可能に。

2026.06
AIエージェントによるキッティング作業
注文票の撮影、文字認識、トレー・部品の搬送などの作業をAIエージェントに自然言語で指示することで、ロボットがワークのキッティングを実施します。
2026.06
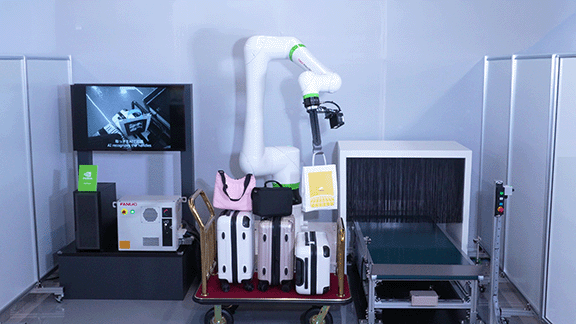
「取っ手」を探し、荷物を取り出し
ロボットが台車上に積まれたキャリーケースや紙袋の「取っ手」をAIがマスタレスで認識し、荷物を取り出します。
2026.06
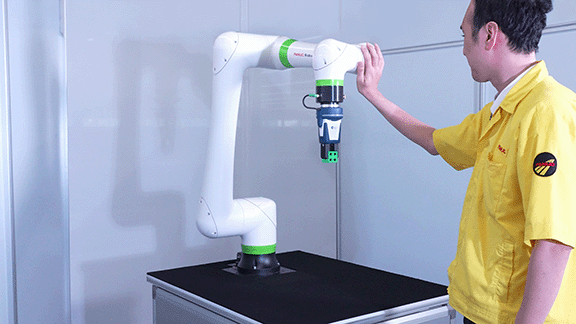
ロボットをちょっと押さえて、人が作業
作業しているロボットが人に押さえられると停止し、人が作業できます。人が手を離すと、作業を再開します。

2026.06
人の作業を模倣するAIロボット
2本のロボットアームが、人が行った作業のコツを模倣学習し、柔軟物であるTシャツを折りたたみます。
* ROS はOpen Source Robotics Foundationの商標です。
** Python はPython Software Foundationの登録商標です。
*** GitHubはGitHub, Inc.の登録商標です。

