ロボット自ら
判断し動作する
フィジカルAIの実現へフィジカルAI(Physical AI)とは、人工知能が仮想空間だけでなく物理空間において自律的に動作する能力を持つ技術です。
ファナックは、3つの軸からオープンプラットフォームに対応し、世界中の開発・研究を行う皆様に、ファナックロボットを使用したフィジカルAIの実現を促進します。
- CONCEPT
世界にもっと、
AIと自動化を。
オープンプラットフォーム対応の3つの軸
1. ROS 2* 対応
ファナックはロボット駆動の中核となる公式 ROS 2 ドライバを開発し、GitHub*** で公開することで、PCからオープンソースソフトウェア ROS 2 を通じて世界中のユーザーが自由にソフトを組み替え、ファナックロボットを動かせる環境を提供します。
特にファナックのROS 2 ドライバは業界最高水準の1ms超高速通信に対応し、リアルタイムな制御が可能となります。
2. Python** 対応
ファナックのロボット制御装置は、PCを介さずPythonプログラムを直接実行できるようになりました。AI開発に広く使われるPythonを活用して開発したAIによるロボット制御が可能です。
3. Stream Motion(位置データ指令高速通信機能)実装
ファナックは位置データ指令高速通信機能である、ストリームモーション機能を開発しロボットに実装しました。位置・速度・トルクのリアルタイム制御が可能です。PCから送られる動作指令を業界最高水準の1ms超高速通信で実行し、軌跡生成ソフトによるリアルタイムなロボット制御を可能にします。
ファナックのフィジカルAIへの取組み
ファナックは、フィジカルAIの社会実装を加速させるために、世界のトップテクノロジー企業と強固なパートナーシップを結び、世界中の産業のオートメーションを推進しています。AIが物理的な動作を通じて現実世界の課題を解決する未来を目指し、産業全体のイノベーションを牽引します。

NVIDIAとの取組み
近年、フィジカルAIの開発においては、現実世界の物理法則を忠実に再現する高度なシミュレーション技術や圧倒的な演算能力が不可欠です。ファナックは、NVIDIAの最新テクノロジーと自社の高い信頼性を持つロボットや精緻なモーション制御技術を融合させ、これまで困難とされてきた作業の自動化を実現する最先端のソリューションを展開しています。

Googleとの取組み
近年、ロボットが自律的に状況を判断し行動するために、大規模言語・視覚モデル(LLM/VLM)をはじめとする最新AI技術の重要性が急速に高まっています。ファナックは、高度なインテリジェンスを支えるGoogleの最先端AIおよび開発プラットフォームを自社の制御技術と融合させ、環境変化に柔軟に対応する次世代の自動化システムを展開しています。

事例紹介

生成AI × ロボット 言葉で操作
AIロボットが様々な言語の音声命令を認識し、生成AIでPythonプログラムを自動作成、周囲を認識しながら命令を実行します。
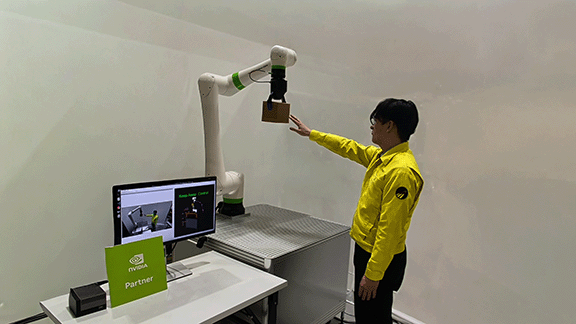
人にぶつからないAIロボット
AIロボットが人を認識し、作業を止めることなくリアルタイムに退避します。人が離れると、元の軌道に復帰します。
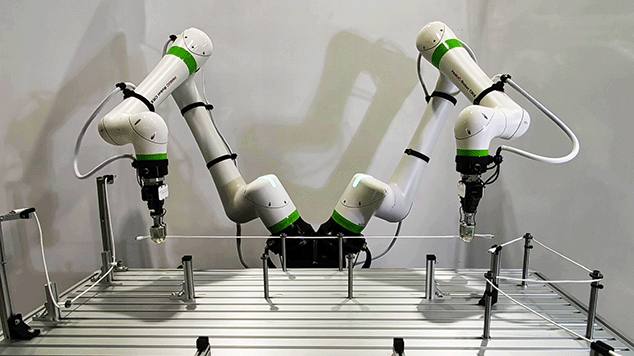
アーム2本で柔らかケーブルを配線
アーム2本が協調作業で柔らかいケーブルを人手の感覚で把握し、張りを認識しながら配線します。
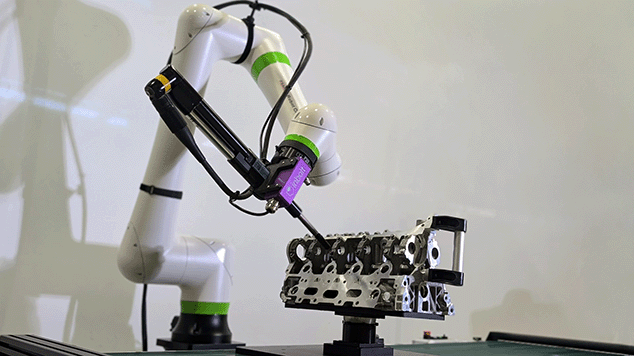
動く部品を追いかけ、ねじ締め
AIロボットが3次元的に動くワークを認識し、リアルタイムに追従。3次元空間で高い追従性能を発揮し、動きながらのねじ締めを可能に。

AIエージェントによるキッティング作業
注文票の撮影、文字認識、トレー・部品の搬送などの作業をAIエージェントに自然言語で指示することで、ロボットがワークのキッティングを実施します。
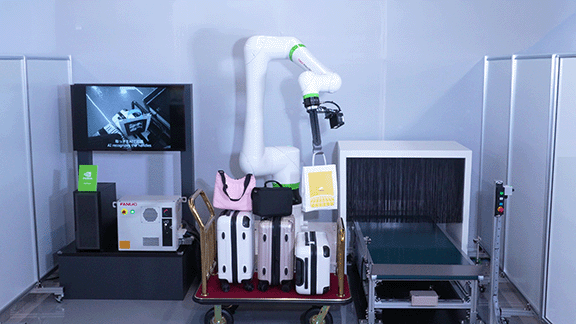
「取っ手」を探し、荷物を取り出し
ロボットが台車上に積まれたキャリーケースや紙袋の「取っ手」をAIがマスタレスで認識し、荷物を取り出します。
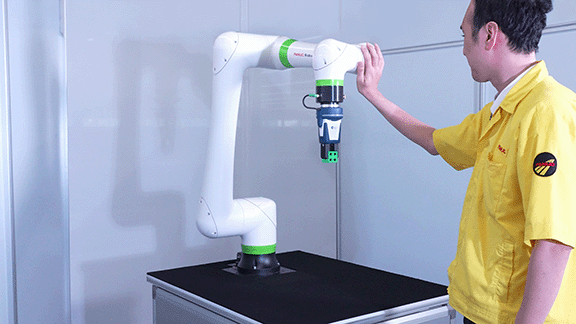
ロボットをちょっと押さえて、人が作業
作業しているロボットが人に押さえられると停止し、人が作業できます。人が手を離すと、作業を再開します。
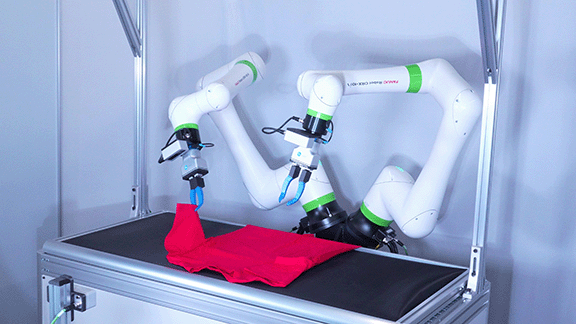
人の作業を模倣するAIロボット
2本のロボットアームが、人が行った作業のコツを模倣学習し、柔軟物であるTシャツを折りたたみます。
* ROS はOpen Source Robotics Foundationの商標です。
** Python はPython Software Foundationの登録商標です。
*** GitHubはGitHub, Inc.の登録商標です。

