公開日: 2026年2月6日
近年、ロボット開発の現場では、オープンソースの標準プラットフォームとして「ROS(Robot Operating System)」が広く利用されています。特に、産業用途や実用化を視野に入れた開発においては、進化版である「ROS 2」の採用が急速に進んでいます。
本記事では、ROSの特徴や構成要素、ROS 1とROS 2の違い、そしてなぜ今、様々なロボット開発にROS 2が選ばれるのかについて、具体的な活用例を交えて解説します。
ROSとは
ROS(通称:ロス)は “Robot Operating System” の略称です。名称にOS(Operating System)とありますが、WindowsのようなOSそのものではありません。 既存のOS上で動く「ミドルウェア(ソフトウェアプラットフォーム)」です。
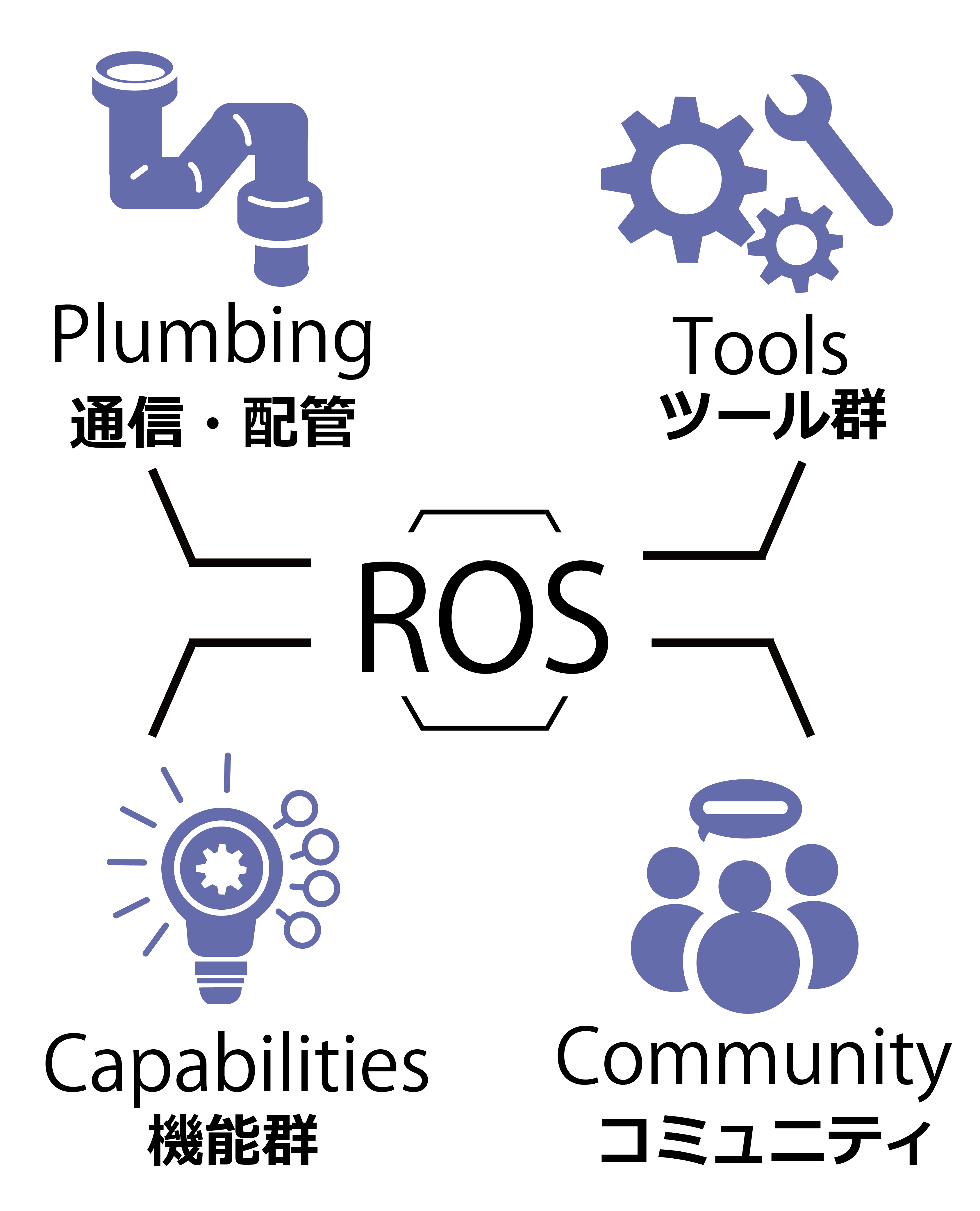
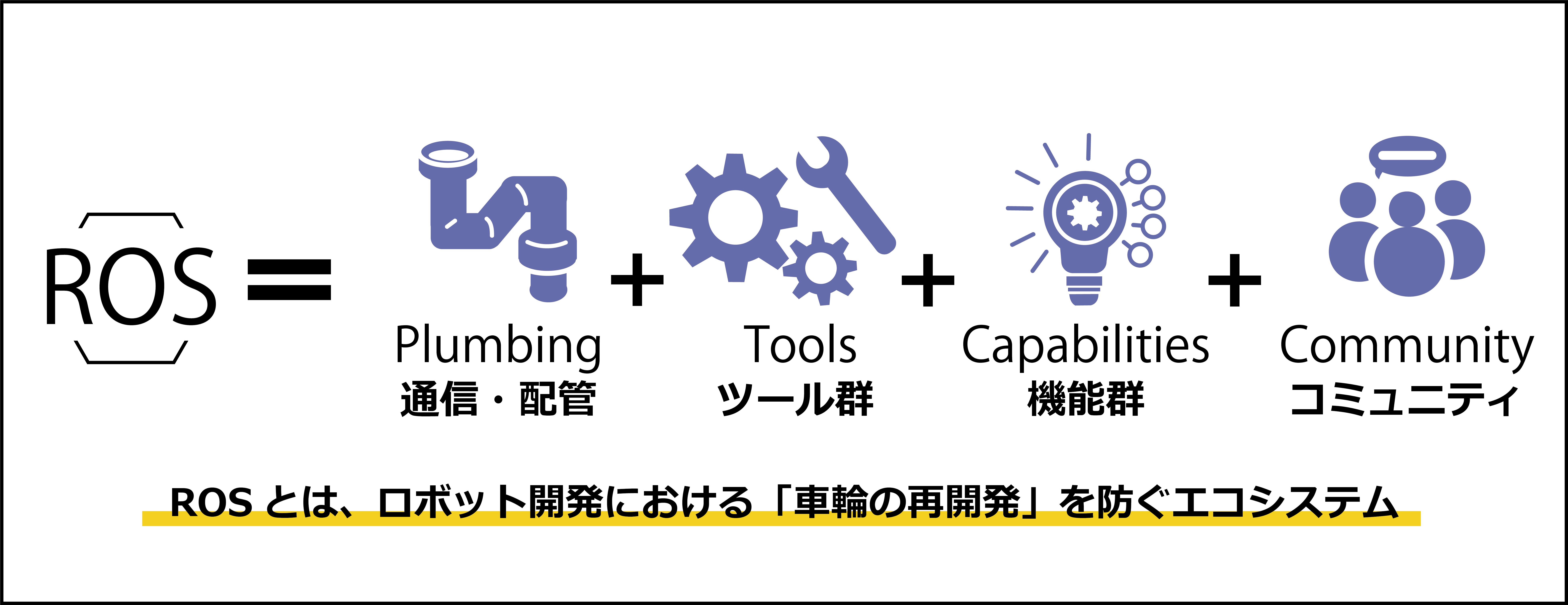
ROSの一番の特徴は、ロボット開発に必要な4つの要素「Plumbing(通信・配管)」「Tools(ツール群)」「Capabilities(機能群)」「Community(コミュニティ)」を一つに統合している点です。これにより、世界中の開発者が作成したライブラリ(ナビゲーション、画像認識、アーム制御など)を、誰でも簡単に利用できます。「車輪の再発明(Reinventing the wheel)」つまり、すでに誰かが作った基本的な機能をゼロから作り直す無駄を防ぐことができ、ロボット開発のスピードを劇的に向上させることができます。
ROS 1とROS 2の違い
ROSには初期の「ROS 1 (ROS)」と、後継の「ROS 2」があります。ROS 1は主に研究用途で発展しましたが、実用化・製品化のニーズに応えるために再設計されたのがROS 2です。
ROS 1とROS 2の主な違いは以下の通りです。
| ROS 1 |
ROS 2 | |
|---|---|---|
| 主な用途 | 研究・プロトタイプ開発 | 研究・プロトタイプ開発用途 製品化・産業用途 |
| 対応OS | Linux (Ubuntu) が中心 | Linux, Windows, macOSなど マルチプラットフォーム |
| 通信方式 | TCPROS/UDPROS (独自) | DDS (データ配信サービスの国際標準規格) |
| リアルタイム性 | なし | あり (制御周期の保証が可能) |
| セキュリティ | 限定的 | SROS 2 による高度なセキュリティ |
ROS 2の特長
ROS 2が世界中で採用される理由は、単なる通信ライブラリにとどまらず、ロボット開発に必要なすべての要素がパッケージ化された「エコシステム」である点にあります。その構成要素は、公式の定義に基づき、以下の方程式で表されます。
「ROS = Plumbing(通信・配管)+Tools(ツール群)+Capabilities(機能群)+Community(コミュニティ)」
それぞれの要素がどのような役割を果たしているのか、解説します。
1. Plumbing(通信・配管)
ソフトウェアによって、カメラ、センサー、モーターといった個別の構成要素をつなぎ、情報をやり取りするための土台となる仕組みです。 ROSの通信は「Publish(配信)/ Subscribe(購読)」という標準化されたパターンを採用しており、開発者は複雑な通信プログラムを自作しなくても、部品同士を容易に連携させることができます。これにより、各部品の独立性が高まり、システム全体の保守性が向上します。
特にROS 2では、通信の中核に「DDS(Data Distribution Service)」という産業用の国際標準規格を採用しました。これにより、通信の信頼性が向上しただけでなく、データの暗号化や認証を行うセキュリティ機能(SROS 2)や、ミリ秒単位の制御を行うリアルタイム通信が可能になりました。
2. Tools(ツール群)
ロボットの状態を可視化したり、シミュレーション、デバッグを行ったりするための便利なソフトウェア群です。 ロボット開発には「物理世界との非同期なやり取り」という難しさがありますが、ROSのツール群(起動、イントロスペクション、デバッグ、可視化、プロット、ロギング、再生など)を使うことで、ロボットが「今何を見ているか」「何を判断したのか」を可視化し、開発効率を劇的に向上させることができます。
・Rviz(可視化):ロボットが認識しているセンサー情報(LIDARやカメラ映像)や地図データを3D空間上にリアルタイムで表示します。
・Gazebo / Ignition(シミュレーション):実機がなくても、物理演算に基づいた仮想空間でテスト走行や動作検証を行えます。これにより、ハードウェア完成前からソフトウェア開発を進めることが可能です。
・Rosbag(記録・再生): センサーデータや通信内容を記録し、後から再生できる機能です。現場で起きた不具合をラボで再現・解析する際に不可欠なツールです。
3. Capabilities(機能群)
「移動する」「地図を作る」「避ける」「掴む」といった、ロボットの具体的な能力を実現するライブラリ群です。 ゼロから開発すると数ヶ月から数年かかるような高度な制御プログラムが、標準機能として提供されています。これらの高度な機能が標準で用意されているため、開発者はパラメータを調整するだけで、アプリケーション固有の価値(ロボットに何をさせるか)に集中することができます。
・Nav2(自律移動): 障害物を避けながら目的地へ移動するナビゲーション機能。
・MoveIt 2(マニピュレーション): アームロボットが物体を掴むための動作計画機能。 これらの高度な機能が標準で用意されているため、開発者はパラメータを調整するだけで高度な制御を実装できます。
・ros2_control(ハードウェア制御): 物理的なアクチュエータ(モーター)やセンサーをリアルタイムで制御するためのフレームワークです。ハードウェアの違いを吸収(抽象化)する役割を持ち、MoveIt 2やNav2といった上位制御の機能が、異なるメーカーのモーターであっても同じように指令を出せる仕組みを提供します。
4. Community(コミュニティ)
世界中の開発者や企業が参加するコミュニティと、そこで共有される膨大なリソースです。 困ったときに質問できるフォーラムや、世界中の誰かが作った便利なパッケージを利用できることは、ROSを使う最大のメリットの一つです。学生や研究者だけでなく、近年では多くの企業がコミュニティに参加しています。
ファナックにおいても、ROS 2ドライバをGitHubに公開し、GitHub上での問い合わせ対応に正式に対応するなど、メーカー公式のサポートに注力しています。 「オープンソースの最新技術」と「メーカー製品の信頼性」を組み合わせて使える環境が整っていることが、ROS 2最大のエコシステム効果と言えます。
ROS 2がロボット開発に使われる理由
ROS 2をロボット開発に活用することで、以下のような利点があります。
開発工数の大幅な削減と分業化
通信・配管(Plumbing)や基本機能(Capabilities)がすでに用意されているため、ユーザーは独自のコアアルゴリズム開発やアプリケーション開発に注力できます。また、開発グループとしても、センサー担当、アーム制御担当、AI担当といった分業がしやすくなり、チーム開発の効率が上がります。
拡張性と柔軟性
カメラやセンサーなど、新しいデバイスが登場しても、ROS 2対応ドライバがあればすぐにシステムに組み込めます。特定のメーカーに依存しない柔軟なシステム構築が可能となり、最新の技術をいち早く現場に導入できます。
ROS 2を使ったロボットの活用例
自動運転・搬送ロボット(AGV/AMR)
工場や倉庫内で自律移動する搬送ロボットには、ROS 2のナビゲーション機能(Nav2)が活用されています。障害物を自動で回避しながら、最適なルートで目的地まで移動する制御が容易に実装できます。

警備・サービスロボット
ビル内を巡回する警備ロボットや受付ロボットにもROS 2が利用されています。カメラ画像からの人物認識や、クラウド経由での遠隔監視システムとの連携基盤としてROSが役立っています。
産業用ロボット(アーム型)
部品のピッキングや組み立てを行うアームロボットでも、ROS 2を使うことで、ケーブルのような不規則な形をしている部品も、センサーで張力を認識し、一定の張りを保ったまま人手のように組み付けるいった、柔軟な動作が可能になります。
ファナックではROS 2対応ドライバを公式に公開しました。これにより、「ROSを活用したAIによる高度な判断」と「産業用ロボットの正確で壊れない動作」を両立させた、次世代の「フィジカルAI」システムの実現も可能です。
ROS 2と共に拓く、ロボット開発
これまで説明したように、ROS 2は、「Plumbing(通信・配管)」「Tools(ツール群)」「Capabilities(機能群)」「Community(コミュニティ)」の4要素が高次元で統合されたプラットフォームです。「ROS 1」よりもセキュリティやリアルタイム性が強化され、よりオープンで使いやすい環境づくりが進んでいます。
これからロボット開発やロボットを使用したシステムを検討する際は、ROS 2のエコシステムをいかに活用できるかが、プロジェクト成功の鍵となるでしょう。
ROS 2とファナックで実現する、次世代の「フィジカルAI」
ファナックでは、オープンプラットフォームへの対応を強化しており、ROS 2ドライバのソースコードをGitHubにて公開しています。このドライバは業界最高水準の1ms超高速制御を実現し、緻密なAI制御の実装を可能にします。さらに、協働ロボット CRXシリーズ に加え、可搬質量3kg~2300kgの幅広いファナックロボットに対応。高い信頼性と柔軟性を兼ね備えています。GitHub上では、公式サポートによる問い合わせ対応を提供し、過去の問合せ対応も参照可能です。開発者コミュニティとの連携を強化し、よりスムーズなロボット開発を支援します。
「最新のAI研究をファナックのロボットで実証したい」 「ROS 2を活用した具体的なシステム構成について相談したい」このようなご要望をお持ちの方は、ぜひ以下のリンクより詳細をご確認ください。

こんな記事も読まれています。
フィジカルAIとは?
2024年頃から急速に社会へ浸透した「生成AI」。そして今、その知能がデジタルの画面を飛び出し、現実世界の「身体」を手に入れる「フィジカルAI」の時代が到来しています。
この新しい波「フィジカルAI」について、その定義から製造現場にもたらす変革、そして最新のシステムまでを解説します。
* ROS はOpen Source Robotics Foundationの商標です。
** Python はPython Software Foundationの登録商標です。
*** GitHubはGitHub, Inc.の登録商標です。
**** Visual Studio Code、VSCodeは、Microsoft Corporationの商標です。

