ロボットハンドとは?|構成要素や選定のポイントを解説
2026/04/17
コラム記事
自動化が加速し、多品種生産や短納期対応が求められる中で、ロボットアームの導入は多くの現場で一般化しています。しかし、工程の成否を左右するのはアームだけではありません。ワークをどのように扱うかを決めるロボットハンドの選定も重要なテーマです。ハンド選びを誤ると、品質のばらつきやタクトタイムの悪化につながり、自動化の力を十分に引き出せません。
本記事では、ロボットハンドの基本構造と選び方をわかりやすく解説します。
目次
ロボットハンドとは
ロボットハンドは、ロボットアームの先端に取り付けられ、ワークをつかむための装置です。エンドエフェクタとも呼ばれます。つかむ・吸着する・保持するなど、工程に必要な「手先の動作」を担う役割があります。種類は多く見えますが、基本は 「把持」「吸着」「磁力」の3つに分類できます。
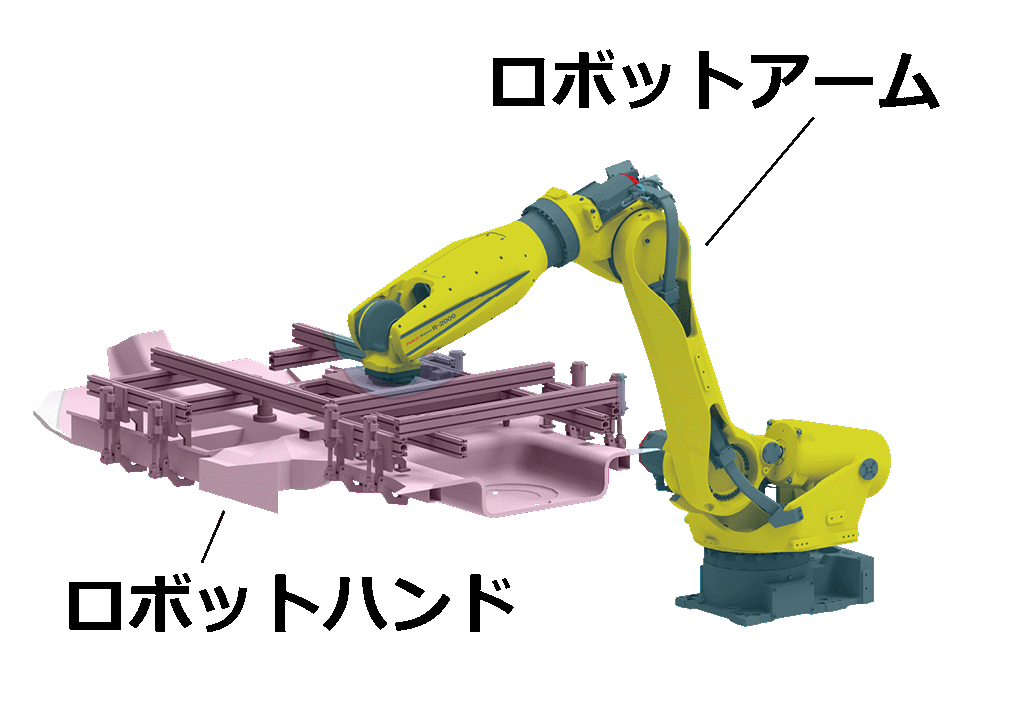
ロボットアームとロボットハンドの違い
ロボットアームとロボットハンドの関係は、人間で例えるとロボットアームが「腕」、ロボットハンドが「手」や「指」に相当します。ロボットアームがワークをどの位置に運ぶかを決める「位置決め」の役割を担うのに対し、ロボットハンドはワークを「どう持つか」「どう掴むか」といった実際の作業を担当します。
ロボットハンドの種類と選び方
ロボットハンドは基本は「把持」「吸着」「磁力」の3つの方式に分類できます。ワークの形状・材質・重量に応じて、この3分類から選ぶのがもっともシンプルで確実な方法です。
把持ハンド
ワークを挟んでつかむ、もっとも一般的なロボットハンドです。金属部品・樹脂成形品など剛性のあるワークに適しており、組立・位置決めが必要な工程で広く使われます。先端のワークと接触する部分は「爪」と呼ばれます。爪の形状・本数・長さ・硬さには様々な種類があり、ワークに適した爪を使用することが重要です。また、ワークの周囲には爪を通す隙間が必要なことに注意が必要です。
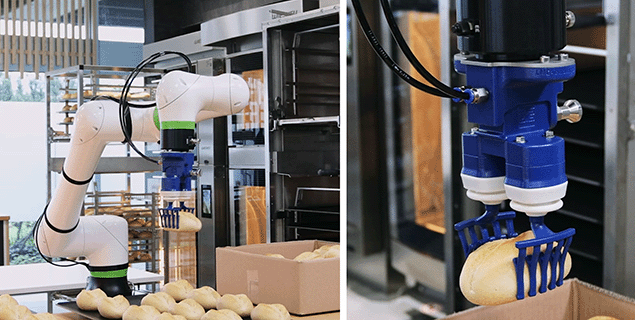
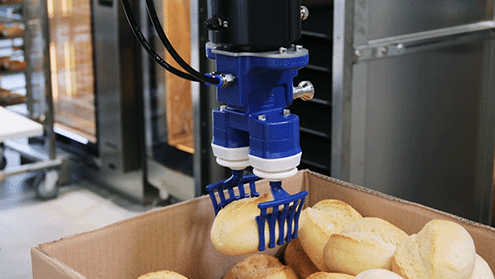
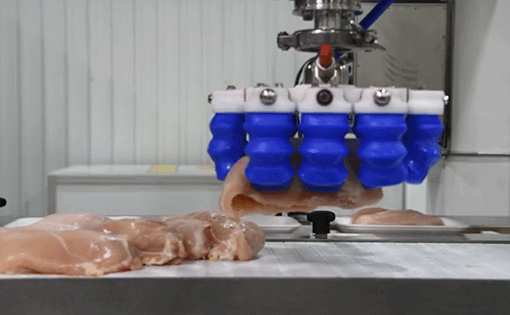
不定形ワークを柔軟に包み込む“ソフトハンド(mGripなど)”も、把持ハンドの一種です。
駆動方式は電動と空気圧の2種類があります。電動方式:モータで駆動し、爪の位置や把持力を細かく制御でき、多品種ワークに向いています。空気圧方式:圧縮空気で駆動し、構造がシンプルなため、軽量で信頼性に優れます。
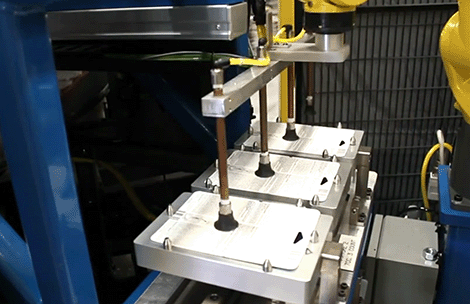
吸着ハンド
吸着ハンドは、空気を吸引する力によってワークを吸い付けて保持するタイプのロボットハンドです。薄くて軽いワークや、平らな面を持つワークの高速搬送に適しており、フィルム・ガラス・基板・段ボールなど、多品種素材の取り扱いに広く用いられています。吸着面には吸着パッドを使用し、ワークの形状に合わせて複数パッドを組み合わせることで、薄物でも変形させずに安定保持できるという特長があります。
また、表面に傷をつけにくいので、外観品質が求められる工程にも向いています。一方で、搬送時の揺れや、表面の凹凸が大きなワーク、多孔質の素材では吸着力が低下しやすいため、ワーク形状に応じたパッドの選定や配置が重要になります。
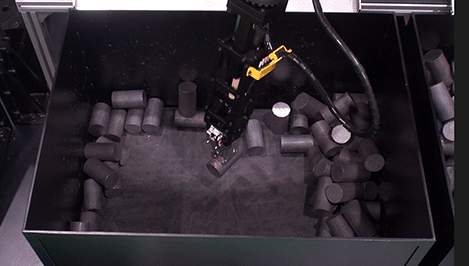
磁力ハンド
磁力ハンドは、磁力を利用して磁性体ワークを保持するタイプのロボットハンドです。鋼板・鉄部品・鋳物など、磁力がよく作用する鉄系ワークの搬送に適しており、特に重量物や表面が荒れたワーク、油が付着したワークでも安定し、薄板から重量物まで幅広い工程で使われています。その一方で、磁力が作用しない 非磁性体ワークや着磁してはいけないワークには使用できない点に注意が必要です。
ロボットハンド選定の基本指標
ロボットハンドを選ぶ際には、ワークの形状や重量だけでなく、作業速度や使用環境など、いくつかの技術的な指標を確認する必要があります。選定を誤ると、ワークの落下、位置ずれ、タクトの悪化といったトラブルにつながり、自動化ライン全体の性能に影響します。ここでは、ハンド選定で必ず押さえておきたい基本的な指標を紹介します。
把持力・吸着力
把持力・吸着力は、ロボットハンドがワークをつかんで保持するために必要な力のことです。ワークの重量だけでなく、動作方向(水平・垂直)や加減速、使用環境によって必要な把持力は変わります。把持力が不足すると、搬送中の落下や位置ずれが発生し、工程の品質や安全性に影響します。逆に、過剰な把持力はワークの破損につながるため、対象物に応じた適切な力設定が重要になります。
剛性
剛性は、ロボットハンドの爪や本体が どれだけ変形しにくいかを示す指標です。剛性が不足すると、爪のしなりやガタつきによってワークの位置がわずかにずれ、組立・検査など精度が求められる工程で不具合の原因になります。爪が長い場合や、重いワークを先端でつかむ場合は、ハンドに曲げやねじれが発生しやすく、さらに高い剛性が必要になります。そのため、爪の長さ・ワーク重量・把持位置に応じた剛性確保が重要です。
ロボットの可搬重量とのバランス
ロボットの可搬重量は「ワークの重さ」だけでなく、ロボットハンド・アタッチメント類を含めた総重量と重心位置で決まります。そのため、ワークが軽くても、ハンドが重かったり、掴む位置がハンドの根元から遠い場合にはロボットの可搬重量・許容モーメント・許容イナーシャの上限を超えてしまい、アラーム発生や安定稼働の妨げの原因になります。
自動化ラインを安定稼働させるためには、「ワーク重量+ハンド重量+重心位置」 を合わせて確認し、ロボットが安定して動作できる範囲に収める必要があります。
IP(防塵・防水)性能
IP(防塵・防水)性能は粉塵や水がロボットハンド内部にどの程度入りにくいかを示す指標です。切削油やミストが舞う環境、粉塵の多い工程では、ハンド内部への異物侵入が故障や寿命低下につながるため、適切な IP 等級の確保が重要になります。
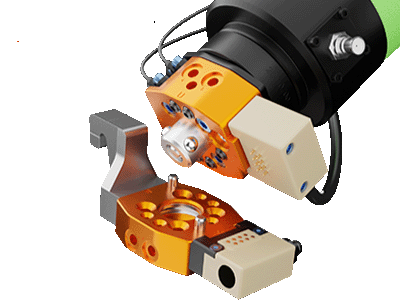
多品種に対応するツールチェンジャー
ツールチェンジャーは、ロボットハンドを自動で着脱する機構です。1つのハンドだけでは決まった作業しか行えず、別の作業をするときはその都度ハンドを手動で交換する必要があります。ツールチェンジャーを使えば、ハンドやねじ締め工具などのエンドエフェクタを自動で切り替えられます。これにより、1台のロボットで搬送・組立・検査など、複数の工程に柔軟に対応できる運用が可能になります
ファナックのロボットハンド
ロボットハンドは、工程の品質やタクトタイムを左右する重要な要素です。ワークの形状・重量・材質に合わせて、把持・吸着・磁力といった方式を適切に選ぶことで、自動化ラインの安定性と生産性を大きく向上できます。また、ツールチェンジャーを活用すれば、多品種生産にも柔軟に対応できます。
ファナックの協働ロボット「CRXシリーズ」はロボットハンドをはじめとする周辺機器を簡単に接続・設定できるプラグインインタフェースを標準搭載しています。機器をロボットに取り付け、専用プラグインソフトをインストールするだけで、導入直後からスムーズに使用開始できる点が大きな特長です。

特にロボットハンドは、多種多様な機器が揃っており、ワークや工程に応じて最適なタイプを選択可能です。また、ハンド以外にもツールチェンジャーや各種ツールがラインナップされており、CRXシリーズでの自動化の幅を大きく広げることができます。
CRXシリーズで使用できるプラグイン対応機器について詳しく知りたい場合は、ファナック公式のCRXプラグイン紹介ページをご確認いただくか、お問い合わせボタンからぜひお問い合わせください。





